打开文本图片集
摘要:为研究高速列车通过隧道时产生的压力波对车体气密性和车内压力舒适度的影响,建立隧道压力波模拟加载系统。该系统具有非线性、多扰动、多容耦合以及加载的压力波幅值大和变化剧烈等特点,带来控制速度和精度上的难度。为准确模拟加载隧道压力波,采用遗忘开闭环高阶迭代学习控制算法进行控制,利用AMESim和Simulink联合仿真平台进行控制仿真,并对比几种不同学习律的控制效果。仿真结果表明:遗忘开闭环高阶学习律在第7个周期时,压力控制最大误差绝对值已降低到0.358 2kPa,相对于开环PfD和遗忘因子开环PfD型学习律的1.23kPa和0.9462kPa,分别减少70.87%和62.14%,该算法可增加系统稳定性,使得隧道压力波的加载更加快速准确。
关键词:压力波模拟加载系统;迭代学习控制;开闭环高阶学习律;遗忘因子
中图分类号:TP273 文献标志码:A 文章编号:1674-5124(2019)01-0145-05
0 引言
随着高速列车速度的提升,气压波动程度随之加大,特别是当高速列车会车或者在隧道中运行时,车体表面的瞬时压力波幅值会在较大范围内变化。外界空气压力的这种波动通过车体的缝隙或者空调系统的新风道与废排风道影响到车内的压力,如果车内空气压力变化量及变化率超过一定值,就会刺激旅客的耳膜,引起耳肿耳痛,从而影响乘客的舒适性[1];同时会影响到车体的气密性及材料的耐疲劳强度等[2]。
在实际线路上进行高速列车经过隧道时车内外压力对车体气密性、车内压力波动对人舒适性的影响及列车材料耐疲劳强度等的研究,不仅测试周期长、经济成本高,而且会影响列车正常的运营。因此国内中南大学王前选、梁习锋团队搭建了车内压力波试验模拟装置,用于模拟加载列车通过隧道时车内的压力变化,研究压力波动与人耳舒适性的关系[3]。西南交通大学陈春俊团队搭建了隧道压力波模拟加载系统,此系统可以对一节实际列车车厢通过隧道工况时进行车外压力的地面模拟,因此能够同时研究车外隧道压力对车体气密性、车内压力波动对人舒适性的影响以及材料耐疲劳强度。
然而对于隧道压力波模拟加载系统,其多罐体、大容积、调节响应时滞时间长以及加载的压力波幅值大和变化剧烈等因素,带来了压力调节速度及精度的问题。方超等[4-5]针对此系统将时变遗忘因子应用到开环PED学习律中,并与其他学习律迭代控制算法进行了对比分析,證明其在密封箱体压力控制上提高了系统的抗干扰能力和改善了动态性能。但都是开环型控制,存在跟踪速度慢、精度低等问题。文献[6]针对气动加载系统,通过设计一种自抗扰控制器进行非线性、强耦合系统的压力精确跟踪控制,但此控制器需要依赖对象模型,对于无法建立系统数学模型时并不适用。文献[7]针对双容系统,设计了参数自整定的模糊PID控制器,得到了良好的控制效果,但存在糊规则难以制定等问题。
本文针对隧道压力波模拟加载系统,为提高其加载的快速性和精度,提出一种带有时变遗忘因子的开闭环高阶迭代学习控制算法,引入了闭环和多次误差信息来提高控制系统的精度、收敛速度,并利用Simulink与AMESim联合仿真平台建立系统模型及仿真验证。
1 隧道压力波模拟加载系统及模型建立
1.1 隧道压力波模拟加载系统
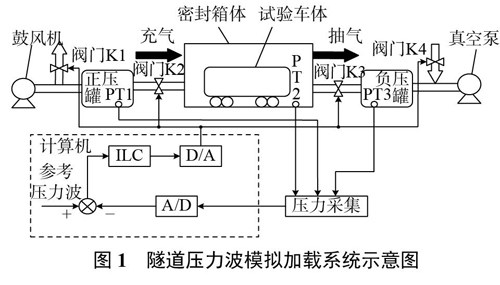
高速列车压力波模拟加载系统主要由鼓风机、真空泵、正负压罐、密封箱体、气动蝶阀、管路、压力传感器及控制系统组成,通过对相应阀门的控制,使密封箱体内形成压力波。压力模拟加载系统示意图如图1所示。
鼓风机和真空泵作为气源系统,分别对正负压罐进行充气抽气,使其压力控制在预设压力附近。之所以设立正负压罐,是因为隧道压力波的幅值波动大、变化剧烈。要使系统能够快速地跟踪隧道压力波,需要提高正压罐的压力,使其远超于隧道压力波最大值;降低负压罐内压力,使其远低于隧道压力波最小值。之后通过控制阀门K2和K3对密封箱体进行充气抽气,使整个系统能够精确地跟踪隧道压力波。密封箱体用来放置一整节车厢,通过形成相应的隧道压力波来进行车体的气密性及材料耐疲劳强度等试验研究。
1.2 联合仿真模型的建立
此系统是多容积相互耦合的复杂系统,要建立精确的数学模型具有一定的难度,因此利用AMESim软件提供的物理模型,搭建压力模拟加载系统模型。同时利用Simulink在控制策略上的优势,建立系统的控制算法,并利用AMESim与Simulink提供的外部接口Co-simulation Interface将两者结合起来进行联合仿真。压力波模拟加载系统联合仿真模型如图2所示。
由于密封箱体内需要放入一节真实尺寸的试验车体,密封箱体设计的实际体积是4m×4.2m×30m,约为500m3;同时试验车体的真实体积约为250m3。因此在AMESim中进行参数设置时,其体积要减去试验车体体积。系统重要模型参数如表1所示。
2 迭代控制算法学习律研究
2.1 控制算法
本控制系统分为调节阶段和加载阶段。在调节阶段进行正负压罐的充气抽气,使其内压力达到预设压力;加载阶段为密封箱体内的隧道压力波加载。
开始后,鼓风机和真空泵对正负压罐进行充气抽气,通过控制阀门K1和K4使其稳定在预设值范围;在加载阶段通过控制阀门K2和K3的动作对密封箱体进行充气抽气,使其内部形成隧道压力波。因此阀门K2和K3的动作和密封箱体内的压力变化会影响到正负压罐内的压力,使其产生波动,偏离预设值;同时正负压罐内的压力波动又会影响到密封箱体内隧道压力波加载的精度,因此形成多容积的耦合。压力加载系统的控制流程图如图3所示。
在进行相关研究时,此多容耦合系统需对车体进行反复的隧道压力波加载,具有重复性。因此采用PID型迭代学习控制算法,利用其逐步跟随学习的特点和其解决非线性系统不需要精确的数学模型的优势,以及其控制简单、有效的特点[8]。
对于正负压罐,其内压力控制是定值控制,采用传统的PID定值控制,使其內压力稳定在预设压力。对于密封箱体,为变压力控制,为了增加系统的精度、收敛的快速性以及抗干扰能力,采用带有遗忘因子的高阶学习律,可有效提高系统稳定性、抗干扰能力,同时加快收敛速度和控制精度[9-10]。系统的误差定义为系统参考隧道压力yd(t)与密封箱体内的实际压力yk(t)之差:
ek(t)=yd(t)-yk(t)(1)
控制系统根据误差ek(t)对气动蝶阀进行控制,本文选用带有时变遗忘因子的开闭环高阶迭代控制学习律:
式中:k——迭代周期;
λk——时变遗忘因子;
Pl——比例学习增益系数;
Il——积分学习增益系数;
Dl——微分学习增益系数。
此学习律利用了前3次误差信息ek+1(t)、ek(t)以及ek-1(t),由于对学习过程中以往信息的充分利用,在有扰动时可使系统有更好的跟踪性能,算法收敛速度也有一定程度提高[11]。同时引入时变遗忘因子,主要是考虑初始偏差项的影响,将式(2)通过递推法,可得到:
引入时变遗忘因子后,随迭代次数的增加,早期的控制作用对当前控制信息的输出影响就会越来越小,这样可以使控制信号的变化更为平滑[12]。为实现上述目的,在设计算法时,定义λk=Ck,其中C为常数,0≤C≤1。
2.2 参考隧道压力波的选取
选用某型高速列车以350km/h通过某隧道时头车车外的压力波作为参考隧道压力波,通过滤波、截取等处理得到,此参考压力波周期为40s,3个周期的隧道参考压力波如图4所示。
3 仿真分析
根据搭建好的联合仿真模型,采用带有时变遗忘因子的开闭环高阶迭代学习控制算法进行密封箱体内的压力控制。经过参数优化整定后,仿真的第3,5,7个周期密封箱体内的压力如图5所示,这3个周期下密封箱体内的压力与参考隧道压力波之间的误差如图6所示。
从图5和图6中可以看出,第3个周期时,密封箱体内的压力已能大致上跟随参考隧道压力波的变化,但在波形变化较大以及波形上升和下降交替处误差较大,最大误差绝对值为0.8335kPa;第5个周期时,具有更好的跟踪效果,更加逼近了参考隧道压力波的波形,但在压力波变化率较大处仍不理想,最大误差绝对值为0.683kPa,相对于第3个周期减少了18.05%;第7个周期时,密封箱体内的实际压力进一步逼近参考隧道压力波,波形趋于稳定,跟随效果更好,整体误差也更小,最大误差绝对值为0.3582kPa,相对于第5个周期减少了47.55%。
本文还进行了开环PID型学习律和带有时变遗忘因子开环PID型学习律的联合仿真控制。经过参数优化整定仿真后,第20个周期时,两者在密封箱体内压力波的控制效果如图7所示。
由图7可以看出,这两种开环学习律的控制效果不佳,在迭代了20个周期后,密封箱体内的压力仍不能很好地跟踪参考隧道压力波。现对比开环PID型学习律、遗忘因子开环PID型以及遗忘因子开闭环高阶型3种学习律的迭代控制算法,将3种学习律控制下密封箱体内的压力与参考压力波的误差值绘制对比,前两者取第20周期的误差,遗忘因子开闭环高阶型取第7个周期的误差,如图8所示。
可以看出,遗忘因子开环PID型学习律在密封箱体压力控制上比单一开环PID型学习律具有较好的控制效果,压力最大误差绝对值从1.23kPa降低到0.9462kPa,减少了23.07%;遗忘因子开闭环高阶学习律与前两者相比,控制效果得到明显的提升,在第7个周期的压力跟踪上,其控制效果已经高于前两者第20个周期的效果,压力最大误差绝对值降低到0.3582kPa,相对于前两者学习律分别减少了70.87%和62.14%。综上分析,遗忘因子和闭环信息的引入,提升了系统的抗干扰能力,提高了系统的稳定性,控制精度更高,收敛速度更快。
4 结束语
本文研制搭建了隧道压力波模拟加载系统,为准确模拟隧道压力波,采用遗忘开闭环高阶迭代学习控制算法进行控制,并与其他几种学习律控制效果进行了对比。仿真结果表明:遗忘开闭环高阶学习律在第7个周期时最大误差绝对值已降低到0.3582kPa,相对于开环PID控制和遗忘因子开环PID控制第20个周期时的1.23kPa和0.9462kPa,分别减少了70.87%和62.14%,控制效果明显提升。由此可见,遗忘因子和闭环信息的引入,使得系统加载压力波的速度更快,精度更高,系统稳定性更强,本文可为相似的压力系统的控制优化提供参考。
参考文献
[1]田红旗.列车空气动力学[M].北京:北京铁道出版社,2007;15-27.
[2]RAGHUNATHAN R S,KIM H D,SETOGUCHI T.Aerodynamics of high-speed train[J].Progress in aerospacesciences,2002,38:469-514.
[3]王前选,梁习锋,任鑫.列车高速通过隧道时车内压力波模拟试验研究[J].中南大学学报(自然科学版),2014,45(5):1699-1704.
[4]杨伟芳,陈春俊,邓力.高速列车隧道压力波模拟系统仿真控制研究[J].中国测试,2014,40(2):101-104.
[5]方超,陈春俊,熊文伟.高速列车隧道压力波模拟迭代遗忘因子控制[J].控制工程,2015,22(3):486-489.
[6]刘福才,王立新,贾晓菁,等.线性/非线性自抗扰切换控制在变载荷气动加载系统中的应用[J].机械工程学报,2018,54(12):225-232.
[7]杨奇.双容系统的模糊PID控制[J].自动化与仪器仪表,2015(7):11-13.
[8]孙明轩,黄宝健.迭代学习控制[M].北京:国防工业出版社,1999:25-40.
[9]BIEN Z,HUH K M.Higher-order iterative learning controlalgorithm[J].IEE Proceedings-Control Theory and Applica-tions,1989,136(3):105-112.
[10]杨红.带遗忘因子的PD型迭代学习控制算法研究[J].暨南大学学报(自然科学与医学版),2013,34(1):27-30.
[11]逢勃,邵诚.高阶参数优化迭代学习控制算法[J].控制理论与应用,2015,32(4):561-567.
[12]汪首坤,彭建敏.带遗忘因子的预测迭代学习控制在阀控非对称缸系统中的应用研究[J].机械工程学报,2014,50(10):191-198.
扩展阅读文章
推荐阅读文章
花田文秘网 https://www.huatianclub.com
Copyright © 2002-2018 . 花田文秘网 版权所有