打开文本图片集
摘 要:提出一种测量倒车雷达探测范围的方法,利用激光器、激光测距仪及三坐标测量机结合超声波雷达的原理,通过光滑拟合雷达最远探测点的方式,可视化显示倒车雷达探测范围,经过试验验证该方法的测量准确度为2%,最后利用该方法确定倒车雷达在视野盲区内为不同障碍物提供的有效探测范围。该文通过将整车上的倒车雷达复制到台架上的方式测量倒车雷达的探测范围,为国内尚不明确的倒车雷达测量范围测试标准提供参考。
关键词:视野盲区;倒车雷达探测范围;可视化探测区域;超声波雷达
文献标志码:A 文章编号:1674-5124(2016)05-0042-04
Abstract: This paper has proposed a method to measure the detection range of reversing radar by using a laser, a laser distance meter and a coordinate measurement machine. Specifically, fit the farthest position that radar can detect smoothly with the operating principle of ultrasonic radar to visualize the detection range of reversing radar. The measurement accuracy was verified to be 2%. The last step was determining the effective detection scope provided by the reversing radar in blind spot vision to different obstacles. Particularly, the radar system installed on vehicle was reverted to a test bench to measure the detection range. The method offers a reference for domestic standards that are still indefinite for the measurement range of reversing radar.
Keywords: blind spot vision; reversing radar detection range; visual detection area; ultrasonic radar
0 引 言
随着汽车行业的飞速发展,人们对汽车的需求不再局限于简单的代步功能,汽车安全问题得到越来越多的重视。近年来倒车事故频发,其主要原因是驾驶员视野中存在盲区。借助于声光电技术的飞速发展,超声波雷达测距已经广泛应用在各个行业,现在国内对提升超声波测距准确度也在做大量的研究[1]。倒车雷达能够为驾驶员提供有效的盲区信息,避免倒车事故的发生[2]。目前,倒车雷达的探测范围、稳定性和捕捉速度等特性均有很大提升[3],不断地为驾驶员提供更安全的信息。
目前,国内涉及车辆后视野的标准仅有GB 15084——2013《机动车辆间接视野装置性能和安装要求》[4],其中主要针对汽车内后视镜、外后视镜、广角外视镜、补盲外视镜(大车前端)、前视镜以及一些外部视觉监视设备(主要为大车配备)提出要求,其中未对倒车雷达提出明确的标准;而目前奇瑞汽车有《倒车雷达性能台架测试及评价测试规范》企业标准,福建省有DB35/T 1274——2012《汽车倒车雷达技术要求和测试方法》地方标准,但并没有明确的测量倒车雷达探测范围的国家标准出台[3]。目前美国高速公路交通安全管理局(NHTSA)正准备在现行FMVSS No.111法规基础上增加对车辆倒车雷达的探测范围的要求,并且正在进行大量摸索试验[5]。本文通过将整车上的倒车雷达复制到台架上的方式,提出一种测量倒车雷达探测范围的方法,并通过大量试验确定该方法的精度,以便后续确定一种高准确度的倒车雷达探测范围测量方案。
1 试验方法
1.1 倒车雷达系统原理
现有的倒车雷达主要是采用超声波进行定位,绝大多数的超声波探头是将发射和接收模块融合在一起,一般采用压电陶瓷元件实现,既可以将电能转换为机械能,又可以将机械能转换为电能,从而实现接收和发射的融合。利用超声波原理,固定在整车尾部的超声波雷达探头可以接收由其发射并且遇到障碍物反射回来的超声波,从而计算车辆尾部与障碍物之间的距离。
当超声波入射到光滑平界面时,将产生反射和折射[6-8],其反射和折射遵循下述公式:
R=■=r2=■2
T=■·■=■
T+R=1
t-r=1
式中:R——声强反射率;
T——声强透射率;
P0——入射波声压;
Pr——反射波声压;
Pt——透射波声压;
r——声压反射率;
t——声压透射率;
Z1、Z2——反射面两侧两种介质的声阻抗。
由上述公式可以看出,当Z1>>Z2或Z2>>Z1时,R≈1,T≈0,即超声波几乎呈现全反射。
在实际应用中,倒车雷达所发出的超声波在空气中传播,空气的声阻抗Z基本为0,故其遇到其他实体介质障碍物时,超声波接近发生全反射,这也是超声波倒车雷达能够广泛应用于车辆尾部测距的理论基础。
1.2 试验方法概述
由于直接在整车上测量倒车雷达探测范围时无法对单个探头进行测量分析,而且对整个探测范围的可视化显示有一定的困难。故本文通过设计机械台架配合三坐标测量机,可以模拟不同整车车型装备的倒车雷达安装姿态,结合1.1中超声波原理,寻找每个独立雷达探头在不同发射角度方向上的极限探测位置,最后采用激光器辅助显示4个雷达探头的探测区域合并范围,即可清晰显示所测量雷达系统的整体探测区域。
首先以水平地面作为z平面、指向车头方向为x正方向建立坐标系,利用三坐标测量机测量VOLVO这款车型上倒车雷达的位置关系;在同一坐标系下调整台架上每个雷达的位置关系,使其满足整车装载倒车雷达的相对位置关系。由于雷达发射的超声波近似呈现圆锥体分布,故本文认为雷达发出的超声波在地面上投影近似为一个扇形(如图1所示)。在每个雷达正上方固定一个线激光器作为试验过程中的辅助显示装置,令激光器的初始发射光线与雷达探头法线方向重合;以雷达发射面法线方向为基准方向,左右每隔5°递增的方式旋转线激光器,在每个方向上沿着激光器光线寻找该角度方向上雷达探测的最远位置并标记在地面上。通过上述操作可以找到每个雷达的探测区域边界以及对应的极限探测张角。在找到雷达探头的极限探测张角后,利用两个激光器即可在地面上清晰地显示出该雷达探头的探测张角范围;在探测张角范围内将地面上每个最远探测位置标记点圆滑地连接起来,配合以激光器显示的张角范围,可以将每个雷达的探测区域清晰地反映在地面上。采用相同的操作方式,可以清晰地模拟显示出该车型上装载的倒车雷达系统的整体探测范围。
2 试验结果及精度分析
2.1 台架上模拟整车倒车雷达系统
以VOLVO该款车型为例,对其车辆尾部从右至左的倒车雷达探头分别编号为1#、2#、3#和4#;同时将台架上的4个雷达探头也进行对应的编号,分别为1′#、2′#、3′#和4′#。采用1.2所述方法,依次调整1′#与2′#、1′#与3′#、1′#与4′#雷达探头之间的相对位置关系和相对角度关系,使其分别满足1#与2#、1#与3#、1#与4#雷达探头的位置关系和相对角度关系;通过上述测量和调整即可将VOLVO这款车型的倒车雷达系统复制到台架上,从而便于后续测量该雷达系统的探测区域及其占整个视野盲区的比例。试验数据如表1、表2所示。采取上述方法,可以将任何车型上装载的倒车雷达系统以相同的方式复制到台架上,有利于后续分别对不同车型倒车雷达系统探测范围进行测量。
2.2 可视化显示雷达系统探测区域
考虑到倒车事故中障碍物绝大多数是低矮的物体,故本文采用一块高度为1.5 m且平整坚实的塑料板作为障碍物,以每个雷达探头法线方向为基准线,利用激光器显示辅助光线,旋转激光器每隔5°在地面上显示出一条直线,检测该直线方向上雷达探测的最远距离;检测每个雷达探头张角范围内相应角度下的最远探测位置并标注在地面上,最后用光滑的曲线顺次连接地面上的标记点,该光滑曲线即可代表对应雷达探头的探测区域边界。实验发现,在雷达两侧极限张角方向上,其探测的距离往往达不到系统说明的最远距离,本文中实验的雷达最远探测距离为2.5 m,但是在极限张角方向上,其探测距离基本在1m左右。
分别对4个雷达探头采用相同的操作,并且分别配合以两个激光器即可在地面可视地显示出该款车型倒车雷达系统的整体探测区域范围,试验效果如图2所示。
2.3 后视盲区范围的确定
根据GB 15084——2013测量标准[4,9-10],利用三维H点装置、不同高度的障碍物以及平面镜,结合镜面反射原理,在车后方慢慢移动障碍物,通过放置在障碍物上方的平面镜和车内后视镜的两次反射,找到平面镜内首次出现三维H点装置的眼点时的位置,该位置距离即为相应高度障碍物的视野盲区的长度;因为GB 15084——2013中要求车外后视镜要能看到车宽以外的视野,故车辆内视镜与外视镜的共同盲区即为上述障碍物与车尾部距离和车宽的乘积。根据2.2中所述的方法确定的倒车雷达系统探测区域与该视野盲区的交集即为倒车雷达提供的有效盲区信息。测量视野盲区试验场景如图3所示,倒车雷达系统占盲区范围示意图如图4所示。
2.4 试验结果及准确度分析
通过验证探测区域连接的光滑边界线的准确程度来确定本文所述方法的准确度。利用2.2中方法找到整个倒车雷达系统的探测区域后,可以一目了然地计算出该款雷达系统的探测区域占整个视野盲区的比例。
2.4.1 探测区域边界的准确度
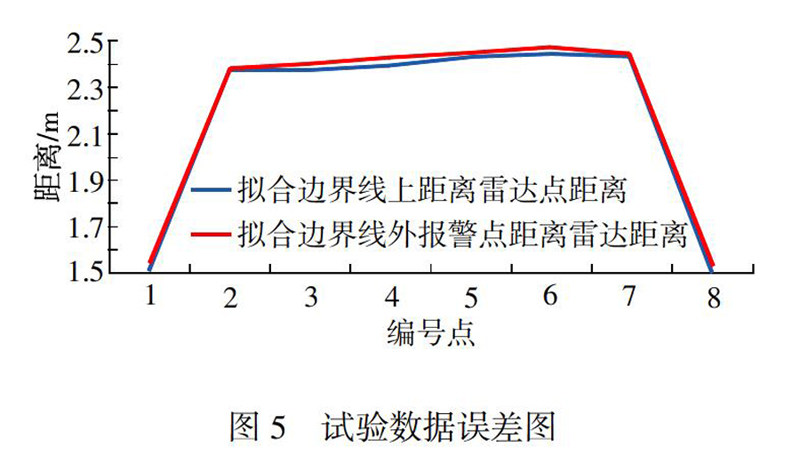
沿着4个雷达探测区域的并集(即整个雷达系统的探测区域)的边界线移动障碍物,检测整个雷达系统的探测区域边界外是否还有触发点,如果有触发点,则计算出该误差点与该方向上标记的最远探测点的相对误差,通过探测拟合边界的相对误差可以确定本文所述方法测量雷达系统探测范围的准确度。表3的实验数据显示,本文所述方法确定的雷达探测区域相对准确度在2%左右,图5是试验测量出的拟合边界外的误差点与该方向拟合曲线上触发点之间的误差图。
2.4.2 倒车雷达探测范围占视野盲区比例的试验结果
利用本文设计的方法测量倒车雷达探测范围会减少一部分由车辆内视镜与外视镜带来的共同视野盲区的范围,这便是雷达系统为驾驶员提供的有效盲区信息。本文选取具有代表性的3种高度的障碍物,分别为:1.0,0.7,0.5 m;依次代表较易引发倒车事故的年龄段为4~6岁的儿童的平均身高、桩类障碍物高度、以及4~6岁年龄段儿童蹲下玩耍时的高度进行试验,测量并计算本文所述方法确定的倒车雷达区域占整体视野盲区的百分比。试验数据如表4所示。
3 结束语
本文提出了一种测量倒车雷达系统探测区域的方法,通过大量的试验验证了该方法的可行性,并给出了该方法的准确度。但是在试验过程中发现准确安装固定每个雷达以及拆卸、旋转辅助激光器的过程比较繁琐,占用了大量的工作时间;并且依靠螺丝固定的方式对试验的精度和一致性有相当大的影响。后续需要对整套试验装置进行一定的改进,使完善后的试验能在一次固定后,通过电机驱动或者其他方式,达到无需人为调整激光器的状态就可完成整个试验过程的目的,即提高整套系统的自动化程度,也能同时提高该方法的测量准确度。
参考文献
[1] 常静,贺焕林. 减少超声波测距仪盲区的研究[J]. 中国棉花加工,2005(5):22-23.
[2] 吴妍. 汽车倒车雷达预警系统研究[D]. 武汉:武汉理工大学,2007.
[3] 刘海峰. 汽车倒车雷达系统全接触[J]. 汽车电器,2007(12):5-8.
[4] 机动车辆间接视野装置性能和安装要求:GB 15084——2013[S]. 北京:中国质检出版社,2013.
[5] Federal Motor Vehicle Safety Standard NO.111 Rearview Mirrors-passenger Cars,Multipurpose Passenger Vehicles, Trucks,Buses,School Buses and Motorcycles[S]. Washington DC:National Highway Traffic Safety Administration,2009.
[6] 唐建. 长输管道超声波内检测技术研究[D]. 北京:北京化工大学,2005.
[7] 牛余朋,成曙. 基于单片机的超声波测距系统[J]. 兵工自动化,2005(4):77-79.
[8] 贾莉娜. 超声物位检测系统中的误差来源及补偿方法[J].仪器仪表用户,2005(1):91-92.
[9] 卢秉杰,白原新,于开国. 汽车后视镜后视野要求及测试方法探讨[J]. 汽车技术,1997(5):15-22.
[10] 吴佳林,孔军. 汽车后视镜盲区及预测方法[J]. 武汉理工大学学报(信息与管理工程版),2010,32(6):958-961.
(编辑:莫婕)
扩展阅读文章
推荐阅读文章
花田文秘网 https://www.huatianclub.com
Copyright © 2002-2018 . 花田文秘网 版权所有